Summary
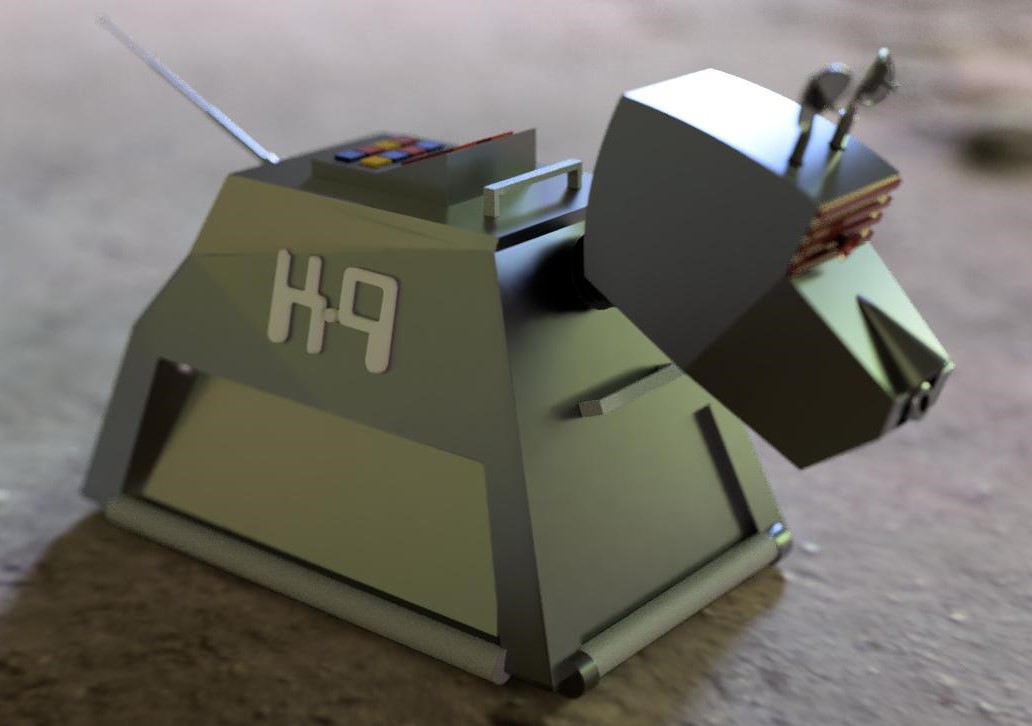
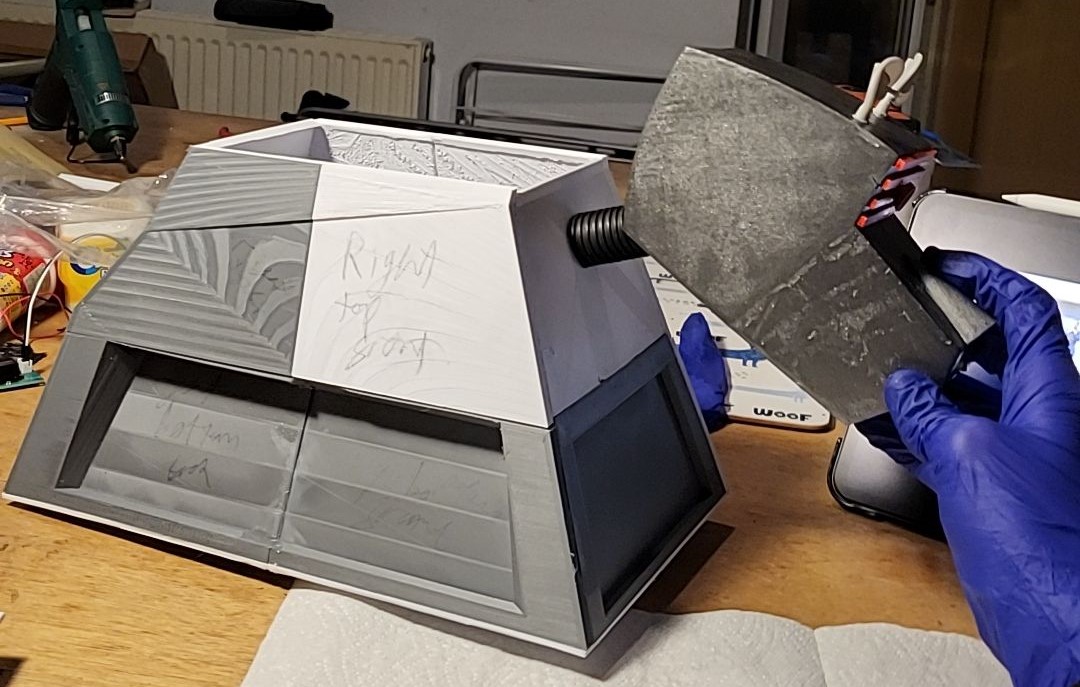
In 2024, I spent some of my free time on-and-off creating a smaller version of K9 from Dr Who with some of the features.
The K9 robot was 3d printed, with ears that move via servos, and the whole thing moving like a tank by using hobby motors.
Download the STL Files Here
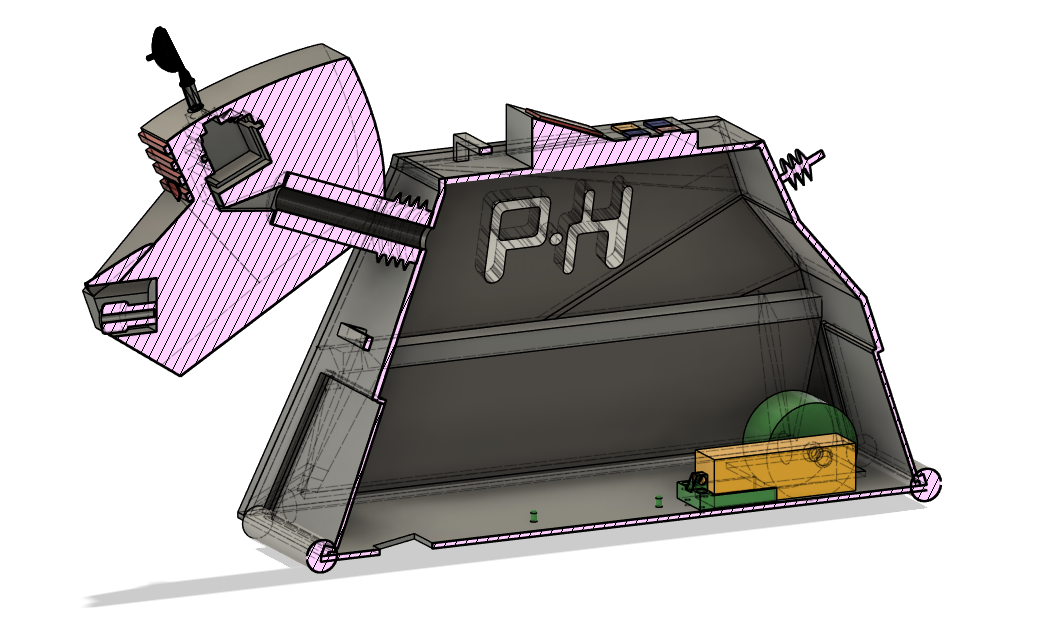
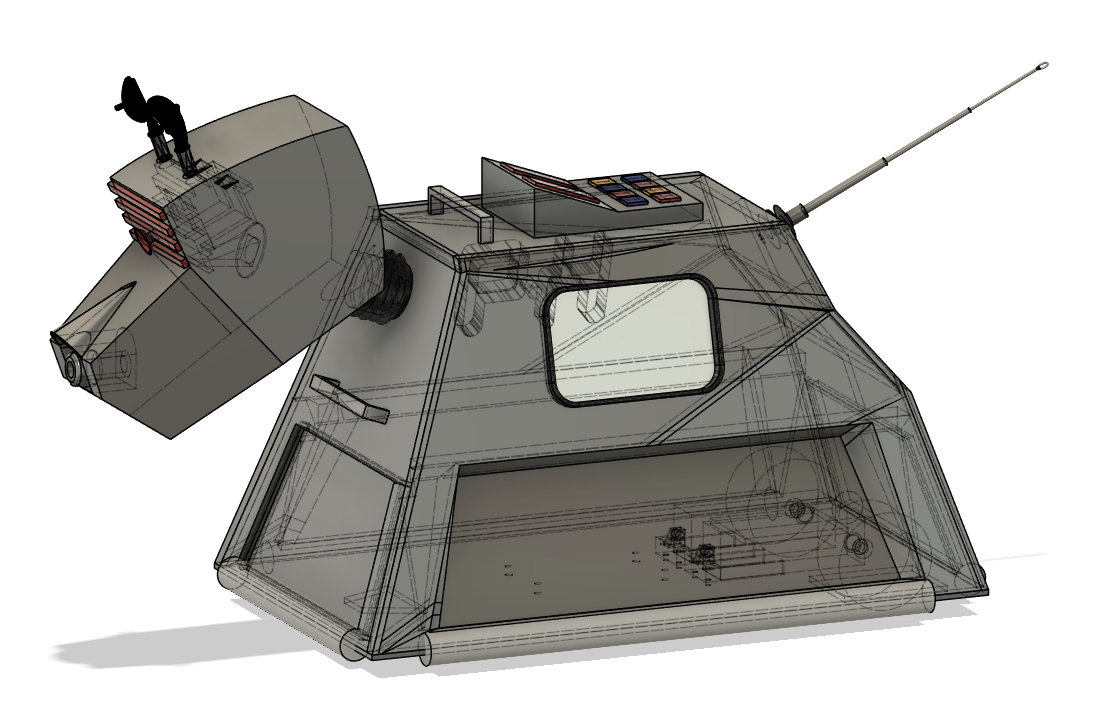
During the making of my robot, I learned to model more effectively in Fusion 360. I learned to better plan my projects, as well as track the progress of printed pieces with tables so that I could see what had and hadn't been completed and what stage of the development process I was at.


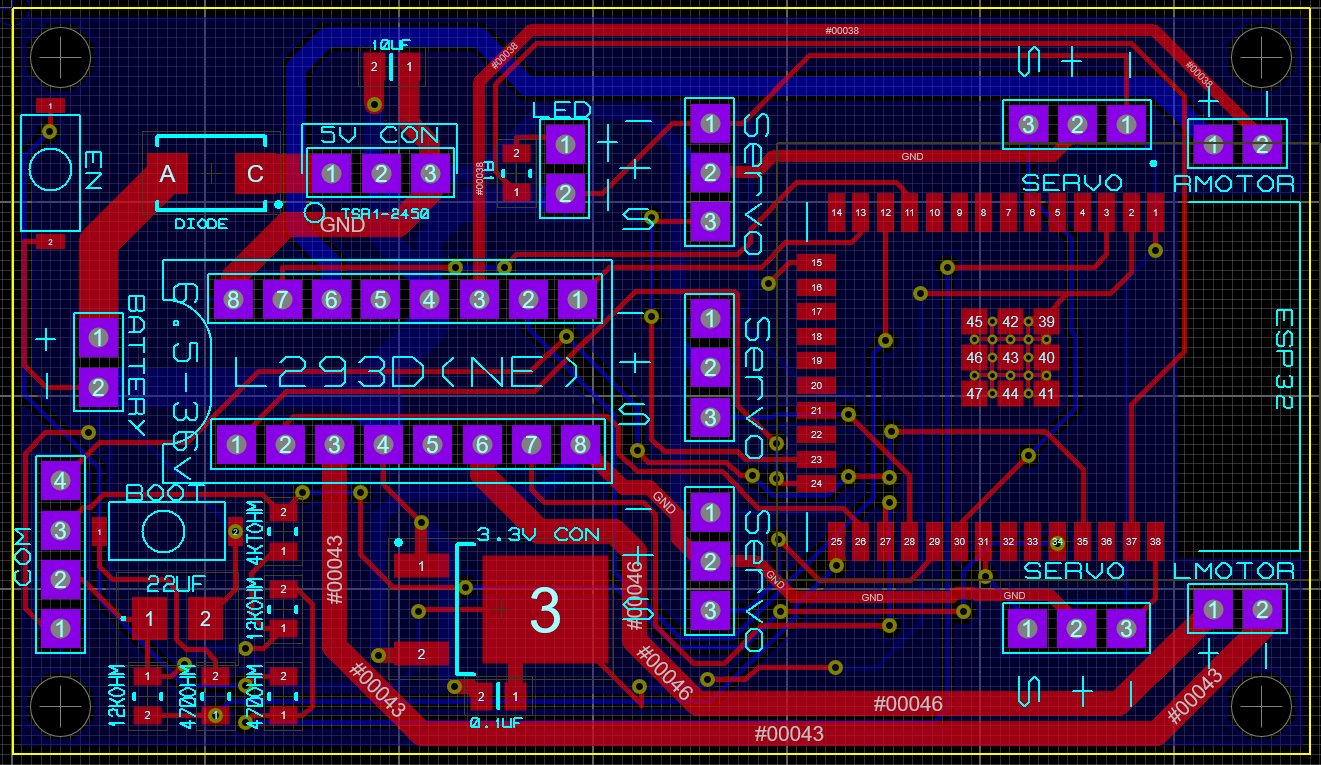
The circuitry for my K9 robot runs off of a NodeMCU ESP32, that I coded in the Arduino IDE. The ESP was then soldered to a circuit board that I designed in Proteus 8 for general robot projects that I make, being physically created by JLCPCB.
The ears of K9 were printed with resin, due to its higher quality for small things.